
Современные производственные предприятия всё чаще сталкиваются с необходимостью обеспечить стабильное качество сварного шва при серийном или мелкосерийном выпуске деталей. Ручная сварка во многом зависит от опыта конкретного специалиста: меняется скорость, угол горелки, длина дуги, форма ванны. В результате одинаковые детали могут выглядеть по-разному, а качество становится нестабильным.
Особенно это заметно при сварке:
- фланцев,
- дисков,
- трубных соединений,
- рамных конструкций.
Заказчики формулируют запрос просто:
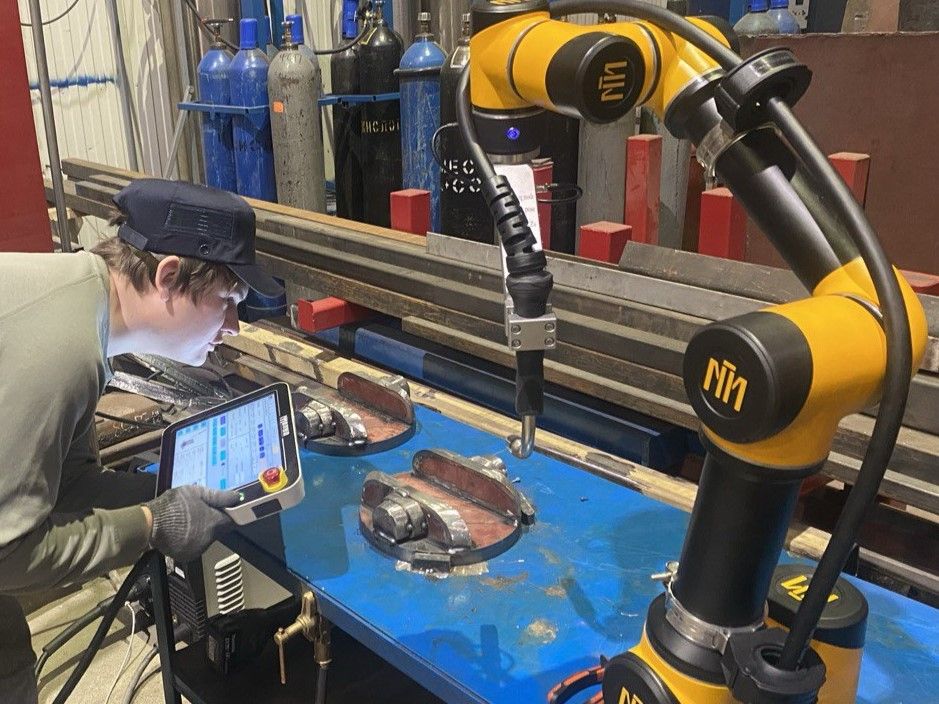
нужен робот, который будет варить одинаково и красиво, без постоянного вмешательства технолога.
При этом часто рассматриваются именно коллаборативные роботы, чтобы:
- быстро получать траектории,
- выставлять точки вручную,
- не строить сложные ограждения.
Однако без продуманной методики настройки автоматизация не даёт ожидаемого результата.
Геометрия шва и логика точек
Для формирования корректного сварного шва используется набор:
- точка начала сварки,
- переходные точки,
- точка закрытия дуги.
Если на одном участке шов получается слишком тонким, точку корректируют по длине, чтобы шов стал чуть «жирнее». Для прихваток обычно уменьшают скорость сварки — тогда они получаются более аккуратными и тонкими. Хорошей практикой является предварительная проверка всех точек и сохранение их в виде шаблонов под разные типы деталей.
Скорости перемещения
Оптимальный подход:
- для декартовых перемещений — минимальная скорость,
- для сферических (изменение ориентации) — более высокая.
Это снижает рывки, уменьшает влияние инерции и делает движение горелки более плавным.
Колебания горелки
Для улучшения формирования шва используется режим колебаний:
- амплитуда около 2 мм,
- частота около 0.5 Гц,
- задержки по краям ~0.3 секунды.
Такой режим помогает равномерно заполнять разделку и формировать симметричный шов
Разные режимы под разные положения шва
Практика показывает:
- вертикальные швы варятся на меньших токах,
- горизонтальные — на больших,
- нижние косые часто выполняются в два прохода: заполнение и закрепление.
Пример ориентировочных значений:
- вертикальные: ~188 А,
- горизонтальные: ~250 А,
- индукция около +5 на 188 А даёт стабильный результат.
Динамика инструмента через его массу
Если на манипуляторе установлена тяжёлая горелка или дополнительное оборудование:
- в системе задаётся масса инструмента,
- ограничиваются ускорения.
Это улучшает повторяемость траектории и снижает вибрации. В режиме ручного ведения такие изменения почти не ощущаются, но в автоматике эффект заметен.
Программное обеспечение
Типовой подход к внедрению:
- Установка ПО под Linux.
- Освоение интерфейса.
- Задание движения по точкам.
- Создание файлов-шаблонов под разные детали.
В результате оператор работает не с программированием, а с выбором готовых режимов.
Решение
Эффективная схема автоматизации сварки выглядит следующим образом:
- Создаётся 3D-модель детали и кондуктора.
- Формируется эталонная траектория сварки.
- Подбираются режимы под пространственные положения шва.
- Настраивается динамика робота.
- Создаётся библиотека шаблонов под типовые изделия.
Такой подход позволяет добиться:
- стабильного внешнего вида шва,
- повторяемости результата,
- сокращения времени на наладку,
- снижения требований к квалификации оператора.
Вывод
Роботизированная сварка — это не просто установка манипулятора. Это комплексная инженерная задача, включающая механику, технологию, кинематику и программирование.
При правильной настройке коллаборативный робот становится инструментом, который обеспечивает предсказуемое качество сварного шва и позволяет масштабировать производство без потери стабильности.

Будем на связи
Подписывайтесь на наши социальные сети, чтобы следить за проектами, кейсами и новыми решениями в области инжиниринга и промышленной автоматизации:
Также вы можете связаться с нами через сайт, чтобы обсудить задачу автоматизации или получить консультацию инженера.



Комментарии